PJS机械式停车设备的工作原理解析
PJS机械式停车设备作为一种常见的立体停车解决方案,凭借结构紧凑、投资相对可控以及适配多种场地条件的特点,被广泛应用于住宅、商务楼宇与改造项目。理解其基本原理,有助于业主、设计方与运营管理者在选型、验收与运维中做出科学判断。本文从系统构成、核心运动机构、控制与监测、安全保障与运行特性等方面,对PJS机械式停车设备的原理进行概述性阐述,内容以概念性说明为主,不涉及具体施工或操作步骤。
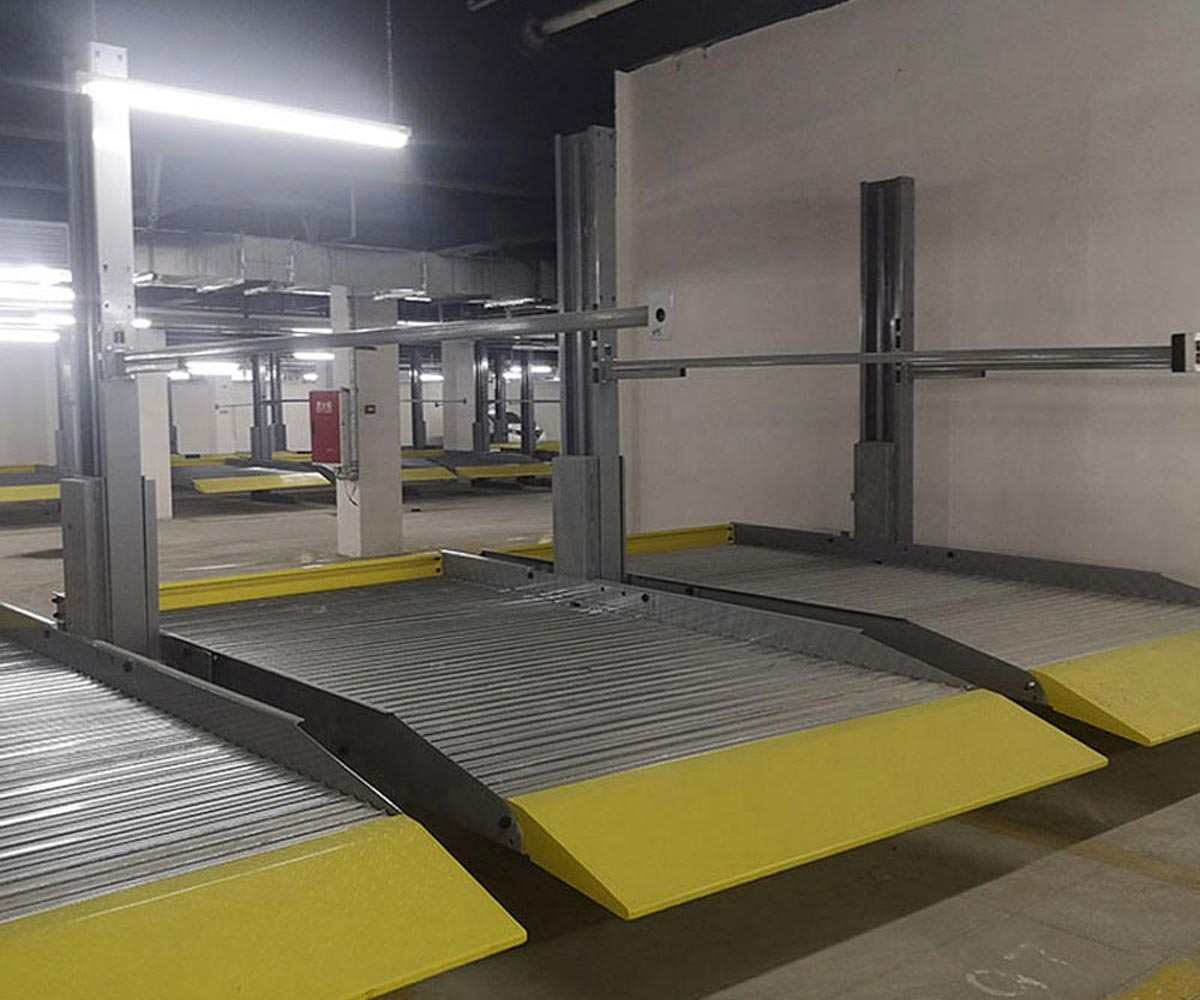
一、系统构成概览
PJS机械式停车设备通常由承载平台(或托盘)、支撑结构(立柱或框架)、驱动与传动系统(电机、减速器、丝杠、链条或齿轮传动等)、控制与监测系统(PLC/控制器、位置传感器、限位开关等)、安全保护装置(防坠、防夹、缓冲、急停)以及必要的基础与预埋件构成。整体系统通过机械与电气的协同,实现车辆在有限空间内的垂直或水平位移,从而提高单层面积的泊位数。

二、核心运动与传动原理
PJS设备的核心在于将车辆的横向与纵向占用通过机械运动进行重排,常见的运动形式包括升降、平移(水平滑移)、俯仰(倾翻)与旋转等。其传动方式可分为电驱传动与液压驱动两大类:
-电驱传动:以电机为动力,经减速器将转矩输出到丝杠、齿轮或链条等传动元件,从而驱动平台的升降或水平滑动。丝杠传动适用于定位精度要求高的场合,齿轮/链条传动在大载荷与长行程时更具优势。
-液压驱动:以液压泵、液压缸提供驱动力,适合需要大推力或缓冲特性的场景。液压系统因其平稳性和抗冲击能力,在某些重载设计中被采用。
无论哪种传动形式,关键在于确保传动系统的冗余与锁定能力,使平台在断电或故障时能够保持稳定停位,避免车辆位移带来的安全风险。
三、定位与控制原理
PJS设备通过多点传感器与限位装置实现精确定位:光电/接近传感器、编码器或行程开关用于检测平台位置、门状态与安全挡位;PLC或嵌入式控制器作为主控单元,依据传感器输入驱动电机/阀门动作,同时执行逻辑判断、故障诊断与动作序列控制。控制策略通常包括启停顺序管理、互锁保护、超载与异常检测等,配合人机界面(HMI)或远程监控系统,实现操作提示与运行记录的保存。
四、安全保障措施(多层防护)
鉴于设备直接承载车辆与与人员可能产生交互,PJS系统设计遵循“多重防护、失效安全”的原则:机械限位、机械锁定装置、防坠器或止动装置、平台边缘防护栏、缓冲器与急停按钮等共同构成物理安全屏障;电气层面则通过互锁电路、过载保护、短路与漏电保护来降低电气风险。此外,系统应具备手动解锁或应急释放方案,供检修或断电状态下使用。所有安全装置需定期检测并形成记录,以保证长期有效性。
五、运行特性与适用范围
PJS机械式停车设备的运行特点包括节约占地、成本相对较低、结构相对简单、对土建配合要求明确等。它适用于泊位数较少、周转频率中低、车种范围相对固定的场景。与此同时,PJS在响应速度、车辆适配多样性与全自动化体验上不如一些复杂的穿梭式或机器人式停车系统,因此在高峰频繁出入或车种差异大的场景应权衡选型。
六、设计与运维的关键关注点(概念性)
在设计阶段应明确服务车辆外廓、平台尺寸、安全余量与基础承载能力,并在控制策略中预留故障处理与维护接口。运维层面强调定期检查传动、润滑、限位与安全装置,保持电气柜的防潮与接地良好,建立事故与故障的上报闭环机制。数字化监测与预警可有效提升故障响应效率并延长设备寿命。
结语
PJS机械式停车设备以其成熟的技术路径和务实的部署特性,成为众多停车需求场景的可行方案。理解其原理有助于在需求评估、方案比选与长期运维中做出合理决策。四川莱贝停车设备有限公司始终致力于为客户提供专业的停车设备咨询、技术论证与运维支持,欢迎就具体场地和需求与我们沟通交流,共同实现安全、经济的停车解决方案。